processes
Introduction
What Is an Operating System?
What is an operating system?
- Middleware between programs and system hardware
- Manages hardware, including the CPU, memory, and I/O devices
When a program runs
- A compiler translates high-level programs into an executable (e.g., ".c" source code to "a.out" on disk)
- The executable contains
- Instructions that the CPU can understand
- Program data (all numbered with addresses)
- Instructions run on the CPU, which implements an Instruction Set Architecture (ISA)
- The CPU includes several registers
- Program Counter (PC): Points to the next instruction to be executed
- Registers for operands, memory addresses, and temporary data
What Happens When You Run a Program?
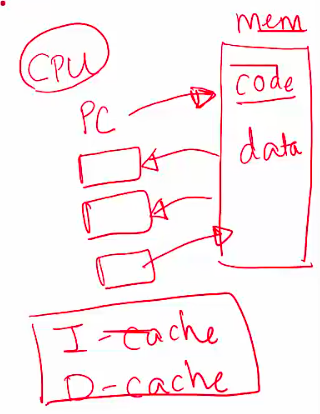
- To run an executable, the CPU
- Fetches the instruction pointed by the PC from memory
- Increments the PC to point to the next instruction
- Loads data required into registers
- Decodes and executes the instruction
- Stores results back to memory, if needed
- Most recently used instructions and data are stored in CPU caches for faster access
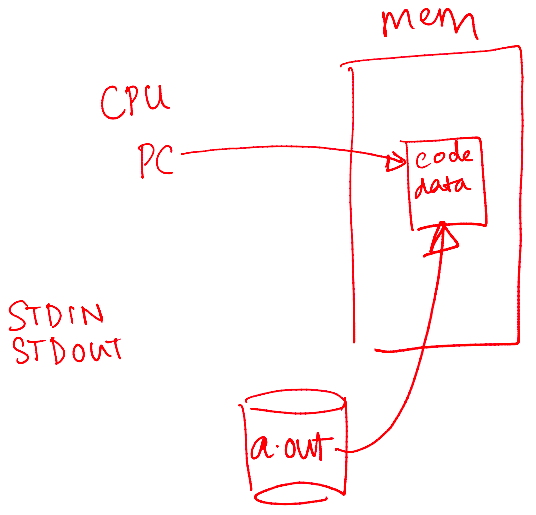
What Does the OS Do?
--
- Manages program memory
- Loads the program executable (code, data) from disk to memory
- Manages the CPU
- Initializes the Program Counter (PC) and other registers to begin execution
- Manages external devices
- Handles reading from and writing files to the disk
How Does the OS Manage CPU?
--
- Provides the process abstraction
- A process is a running program
- The OS creates and manages processes
- Gives each process the illusion of having exclusive access to the CPU by virtualizing the CPU
- Multiple processes (e.g., listening to music, browsing the web) run concurrently
- Timeshares the CPU between processes
- Enables coordination between processes
How Does the OS Manage Memory?
--
- Manages the memory of a process, including code, data, stack, heap, etc.
- Each process believes it has a dedicated memory space, with code and data numbered starting from 0 (virtual addresses)
- Abstracts the details of actual memory placement, translating virtual addresses to physical addresses
- Processes are unaware of how memory is implemented
How Does the OS Manage Devices?
--
- Uses device drivers to manage hardware such as disks, network cards, and other external devices
- Device drivers communicate in the language of the hardware
- Issue instructions to devices (e.g., fetch data from a file)
- Respond to interrupt events from devices (e.g., a keypress on the keyboard)
- Organizes persistent data as a filesystem on disk
Goals of the OS
--
- Abstracts detailed hardware resources for user programs
- Optimizes the use of the CPU, memory, and other resources
- Ensures separation between multiple processes
History of the OS
--
- Began as a library to provide common functionality across programs to
- Abstract the hardware that can be used across different programs
- Access the devices
- Evolved from procedure calls to system calls
- When a system call is made, the CPU executes OS code at a higher privilege level
- Progressed from running a single program to managing multiple processes concurrently
Process Abstraction
What Is Process Abstraction?
--
- When you run an executable file, the OS creates a process, which is a running program
- The OS timeshares the CPU across multiple processes, virtualizing the CPU
- The OS has a CPU scheduler that selects one of the many active processes to execute on a CPU
- A CPU scheduler contains
- Policy: Defines which process to run
- Mechanism: Defines how to perform a "context switch" between processes
What Constitutes a Process?
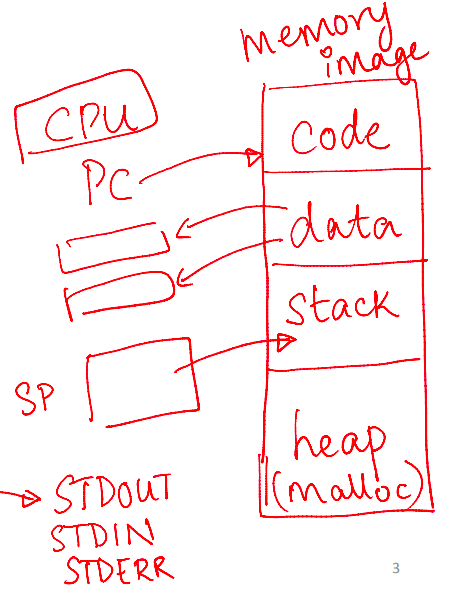
- A unique identifier (PID)
- Memory image
- Code and data (static)
- Stack and heap (dynamic)
- Stack: Stores function calls, local variables, etc.
- Heap: Holds dynamically allocated memory
- CPU context: Registers
- Program Counter (PC)
- Current operands
- Stack pointer
- File descriptors
- Pointers to open files and devices
How Does the OS Create a Process?
- Allocates memory and creates a memory image
- Loads code and data from the disk executable
- Initializes a runtime stack and heap
- Opens basic files:
STDIN,STDOUT,STDERR - Initializes CPU registers
- Sets the Program Counter (PC) to point to the first instruction
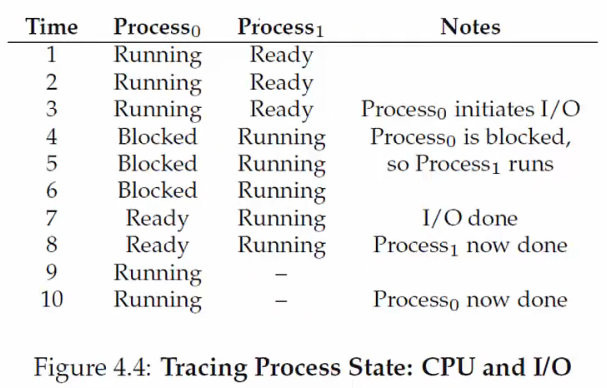
States of a Process
States
- Running: Currently executing on the CPU
- Ready: Waiting to be scheduled
- Blocked: Suspended, not ready to run
- Why? Waiting for some event (e.g., the process issues a read from disk)
- When unblocked? The disk issues an interrupt when data is ready
- New: Being created, not yet running
- Dead: Terminated
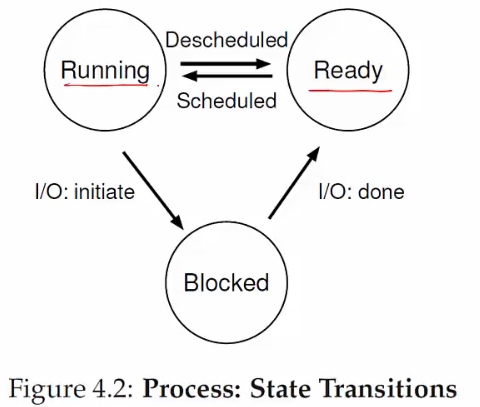
- Ready → Running: The OS scheduler assigns the CPU to the process
- Running → Ready: The OS reclaims the CPU (e.g., time limit reached)
- Running → Blocked: The process initiates a wait (e.g., starts I/O)
- Blocked → Ready: The awaited event finishes (e.g., I/O done), making the process runnable again (waiting for the CPU)
Example
OS Data Structures
--
- The OS maintains a data structure (e.g., a list) of all active processes
- Information about each process is stored in a Process Control Block (
PCB)- Process identifier
- Process state
- Pointers to other related processes (e.g., parent process)
- CPU context of the process (saved when the process is suspended)
- Pointers to memory locations
- Pointers to open files
System Calls for Process Management
What API Does the OS Provide to User Programs?
--
API= Application Programming Interface- Functions available to write user programs
- The
APIprovided by the OS is a set of "system calls"- A system call is a function call into OS code that runs at a higher privilege level of the CPU
- Access to sensitive operations (e.g., access to hardware) is allowed only at a higher privilege level
- Some "blocking" system calls cause the process to be blocked and descheduled (e.g., read from disk)
Should We Rewrite Programs for Each OS?
--
POSIX(Portable Operating System Interface)API: A standard set of system calls that an OS must implement- Programs written to the
POSIX APIcan run on anyPOSIX-compliant OS - Most modern OSes are
POSIX-compliant - Ensures program portability
- Programs written to the
- Programming language libraries hide the details of invoking/canceling system calls
- The
printffunction in the C library calls thewritesystem call to write to the screen - User programs usually do not need to worry about invoking system calls
- The
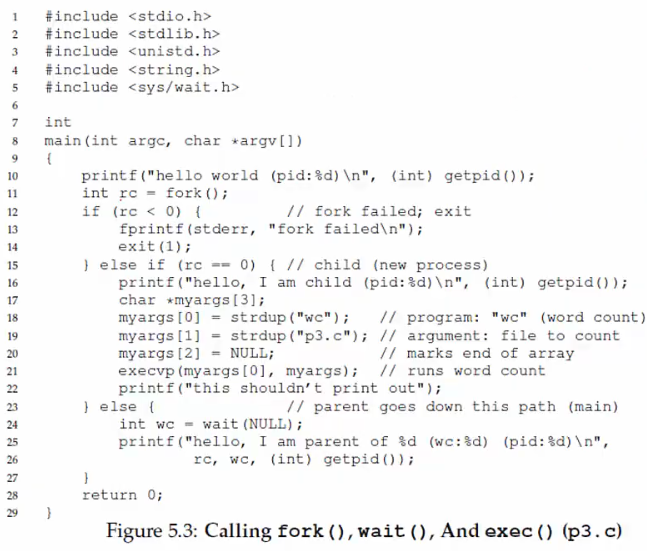
System Call Processes in Unix
System calls
fork()creates a new child process- All processes are created by forking from a parent
- The
initprocess is the ancestor of all processes
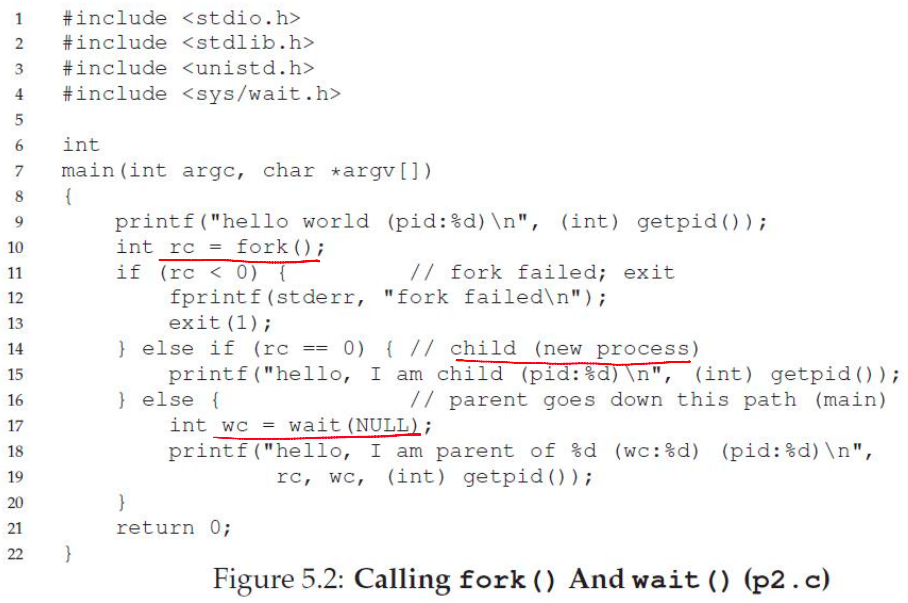
exec()makes a process execute a given executableexit()terminates a processwait()causes a parent to block until the child terminates or waits for a process to finish
Many variants exist of the above system calls with different arguments
What Happens During a Fork()?
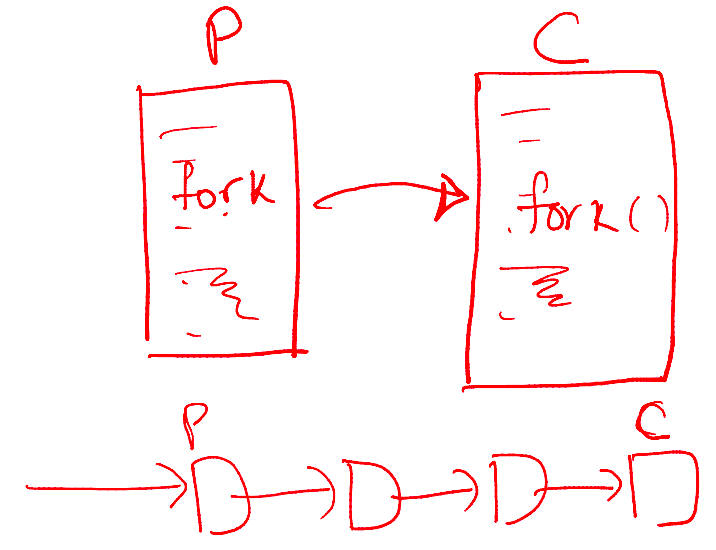
- A new process is created by making a copy of the parent's memory image
- The new process is added to the OS process list and scheduled
- The parent and child start execution just after
fork()(with different return values) - The parent and child execute and modify memory data independently
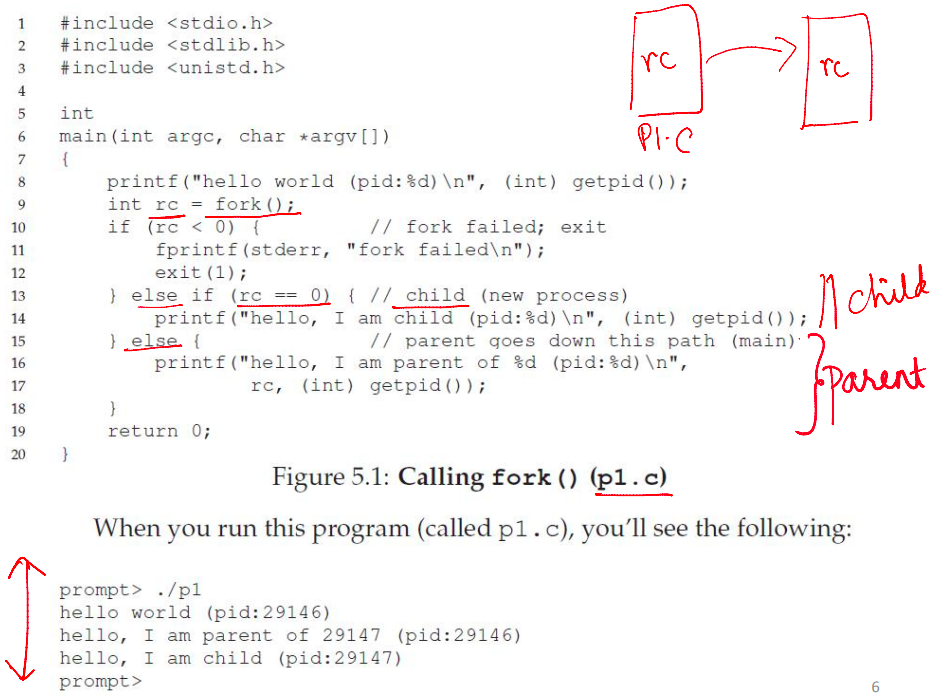
- In the child process,
fork()returns 0 - In the parent process,
fork()returns thePIDof the newly created child process
Waiting for a Child Process to Terminate
--
- Process termination scenarios
- Normal: By calling
exit()(exitis called automatically when the end of themainfunction is reached) - Abnormal: The OS terminates a misbehaving process
- Normal: By calling
- A terminated process exists as a zombie - it still consumes memory
- When a parent calls
wait(), the zombie child is cleaned up or reaped - What if the parent terminates before the child?
- The
initprocess adopts orphans and reaps them
- The
What Happens During Exec()?
--
- After
fork(), the parent and child are running the same code- Not too useful
- A process can run
exec()to load another executable into its memory image - A child can run a different program from the parent
- Replaces the memory image of the current process (code, data, heap, and stack) with the new program
- Variants of
exec(), e.g., to pass command-line arguments to the new executable
How Does a Shell Work?
--
- In a basic OS, the
initprocess is created after the initialization of hardware (on modern systems,systemdorinitwithPID1) - The
initprocess spawns a shell (likebash,zsh, orsh) - The shell reads a user command, forks a child,
execsthe command executable, waits for it to finish, and then reads the next command - Common commands like
lsare all executables that are simplyexec'ed by the shell
Example with general steps
- The shell reads the command
ls - The shell parses the command and locates the
lsexecutable in$PATH(e.g.,/bin/ls) - The shell forks a child process
- The child process calls
execve("/bin/ls", ["ls"], [env]) - The parent shell calls
waitpid()and pauses - The child process writes the result to its standard output
- The child process finishes execution and terminates
- The parent shell resumes after
waitpid()returns and updates the$?status variable - The parent shell displays the prompt (
$), ready for the next command
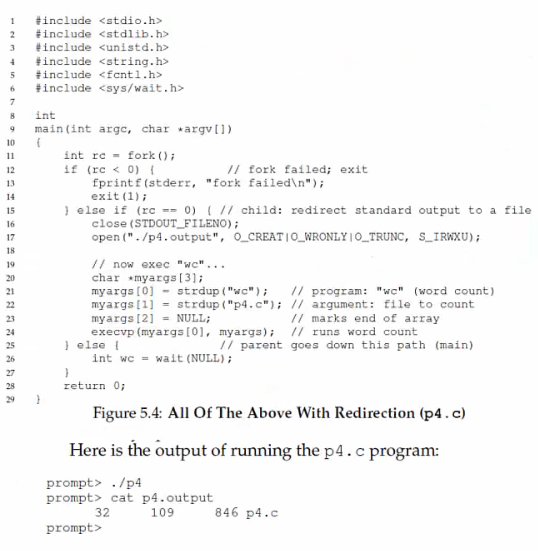
More Funky Things About the Shell
--
- The shell can manipulate the child in strange ways
- Suppose you want to redirect output from a command to a file
prompt>ls > foo.txt- The shell spawns a child, redirects its standard output to a file using
open(), then callsexecon the child
Process Execution Mechanism
Process Execution
--
- The OS allocates memory and creates a memory image
- Code and data (from the executable)
- Stack and heap
- Sets the CPU Program Counter (PC) to the next instruction
- Other registers may store operands, return values, etc.
- After setup, the OS steps aside, and the process executes directly on the CPU
- The OS is not involved in every instruction's execution
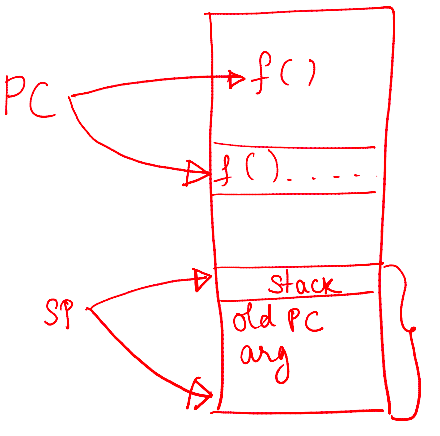
How Does a Simple Function Call Work?
Key concepts
- The Program Counter (PC) holds the memory address of the next instruction to be executed by the CPU
- The Stack Pointer (SP) points to the current top of the stack in memory
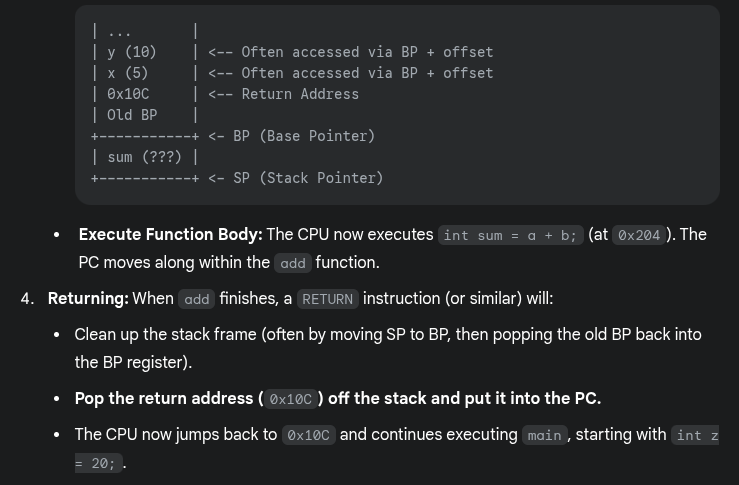
- The Base Pointer (BP) or Frame Pointer (FP) points to a fixed location within the current stack frame, simplifying access to function arguments, local variables, and other stack frame data
- The stack manages function calls and stores temporary data, such as local variables and return addresses
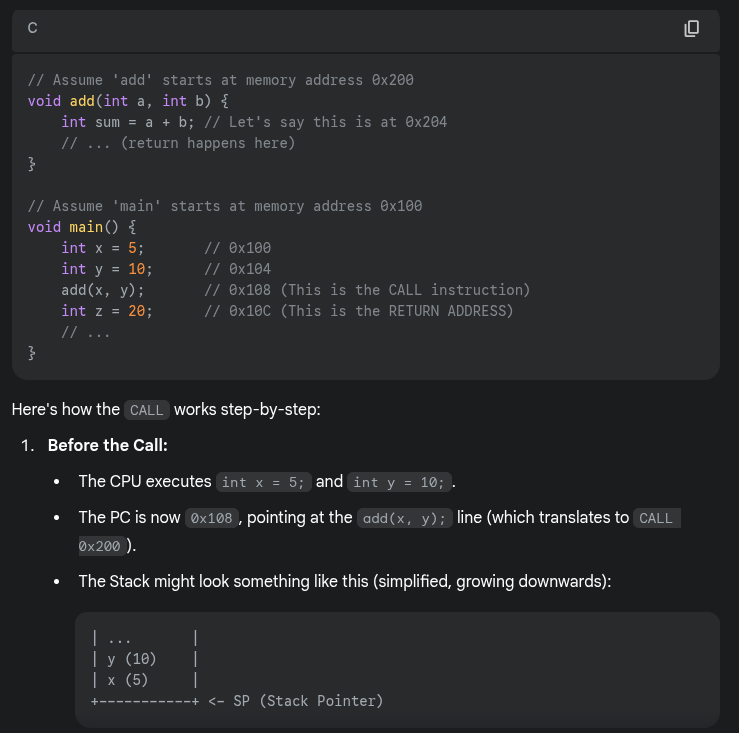
How a simple function call works in sequential flow
- When calling
- The complier turns a function call (e.g.,
myFunction()) into a CPU instruction:CALL - The
CALLinstruction performs two sequential actions- Saves the return address by pushing it onto the stack (the address in the calling function where execution resumes after the called function finishes)
- Updates the PC to point to the memory address where the code for
myFunctionstarts
- The complier turns a function call (e.g.,
- Inside the called function
- A new stack frame is created on the stack
- The SP points to the top of the stack

How Is a System Call Different?
--
- CPU hardware supports multiple privilege levels
- User mode: For running user code
- Kernel mode: For running OS code, such as system calls
- Certain instructions execute only in kernel mode
- The kernel does not trust or use the user stack
- Because the user program might have bugs, or it could be malicious, deliberately setting up its stack to trick the kernel or crash it
- Uses a separate kernel stack in kernel mode
- User stack: Each user process has its own stack in user space
- Kernel stack: When a system call is made, the CPU switches to a kernel stack unique to the calling process but located in kernel space
- The kernel does not trust user-provided addresses for jumps
- The kernel sets up the Interrupt Descriptor Table (IDT) at boot time
- The IDT contains addresses of kernel functions for system calls and other events
- When a user program wants to make a system call, it might trigger a specific interrupt (e.g., INT 0x80 on older Linux/x86)
- The CPU hardware then consults the IDT (which only the kernel can set up) to find the correct kernel handler address
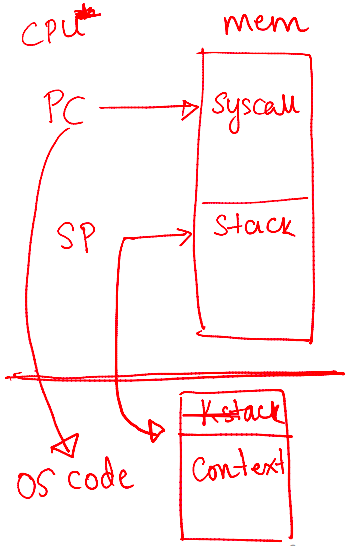
Trap Instruction
Trap instruction execution steps
- When a system call is needed, a special trap instruction is executed (typically hidden from the user by
libc) - Trap execution
- Moves the CPU to a higher privilege level (kernel mode)
- Switches to the kernel stack
- Saves context (PC, registers) on the kernel stack
- Looks up the address in the IDT and jumps to the trap handler function in OS code
Triggers for trap instructions and IDT lookup
- The
trapinstruction is executed on hardware in the following cases- System call (program needs OS service)
- Program fault (program does something illegal, e.g., accesses memory it doesn't have access to)
- Interrupt (external device needs the attention of the OS, e.g., a network packet has arrived on the network card)
- Across all cases, the mechanism is: Save context on the kernel stack and switch to the OS address in the
IDT - The
IDThas many entries/functions; which to use?- System calls/interrupts store a number in a CPU register before calling
trap, to identify whichIDTentry to use
- System calls/interrupts store a number in a CPU register before calling
Return from trap and exit kernel mode
- When the OS is done handling a syscall or interrupt, it calls a special instruction -
return-from-trap- Restores the context of CPU registers from the kernel stack
- Changes CPU privilege from kernel mode to user mode
- Restores the PC and jumps to user code after the
trap
- The user process is unaware that it was suspended and resumes execution as normal
- Will you always return to the same user process from kernel mode? No
- Before returning to user mode, the OS checks whether it should continue running the same process or switch to another process
Before the trap
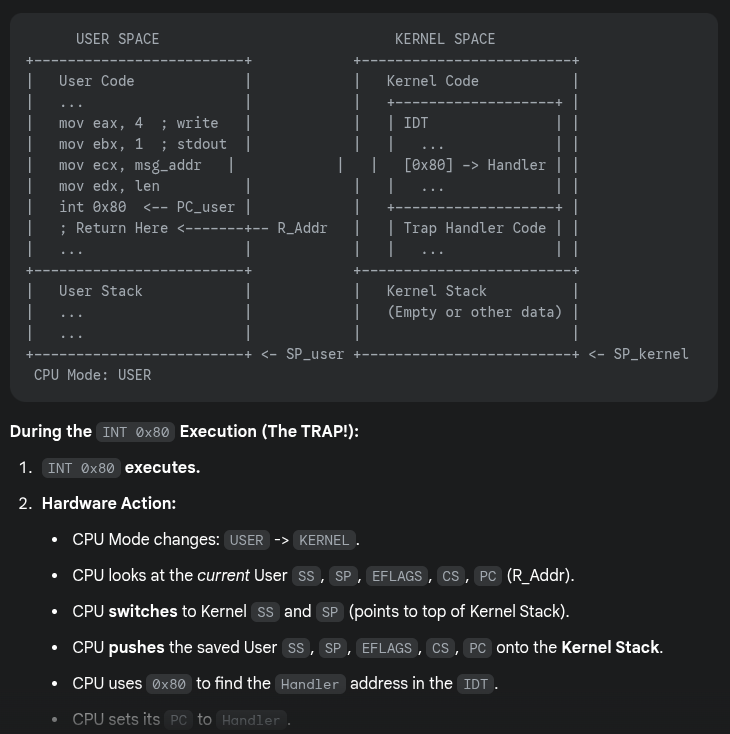
After the trap

Why Switch Between Processes?
--
- When the OS is in kernel mode, it cannot return to the same process it left
- The process has exited or must be terminated (e.g., segfault)
- The process has made a blocking system call (e.g., reading data from disk, waiting for network input, waiting for a timer)
- The process transfers control to the kernel to handle the request
- The kernel starts the operation
- The kernel blocks the process while operating →The process is in a waiting or blocked state → The process cannot use the CPU
- A context switch is performed by the OS to select another process from the "ready" queue to run on the CPU
- After finishing the operation, the kernel updates the process state from "blocked" to "ready"
- The OS does not want to return to the same process
- The process has run for too long
- It must timeshare the CPU with other processes
- → The OS performs a context switch to switch from one process to another
The OS Scheduler
--
- The OS scheduler has two parts
- A policy to pick which process to run
- A mechanism to switch to that process
- Non-preemptive (cooperative) schedulers are polite
- Switch only if the process cannot run - blocked or terminated
- Preemptive (non-cooperative) schedulers can switch even when the process is ready to continue
- The CPU generates a periodic timer interrupt
- After servicing the interrupt, the OS checks if the current process has run for too long
Mechanism of Context Switch
Example: Process A has moved from user mode eto kernel mode, the OS decides it must switch from A to B
- Save the context (PC, registers, kernel stack pointer) of A on its kernel stack
- Switch the
SPto the kernel stack of B - Restore context from B's kernel stack
- Who has saved registers on B's kernel stack?
- The OS did, when it switched out B in the past
- Who has saved registers on B's kernel stack?
- Now, the CPU is running B in kernel mode,
return-from-trapto switch to user mode of B
A Subtlety on Saving Context
--
- Context (PC and other CPU registers) is saved on the kernel stack in two different scenarios
- When going from user mode to kernel mode, user context (e.g., which instruction of user code you stopped at) is saved on the kernel stack by the
trapinstruction- Restored by
return-from-trap
- Restored by
- During a context switch, the kernel context (e.g., where you stopped in the OS code) of process A is saved on the kernel stack of A by the context switching code
- Restores the kernel context of process B
- When going from user mode to kernel mode, user context (e.g., which instruction of user code you stopped at) is saved on the kernel stack by the
Scheduling Policies
What Is a Scheduling Policy?
--
- During a context switch, which process should run next from the set of ready processes?
- The OS scheduler manages the CPU requests (bursts) of processes
- CPU burst: The CPU time used by a process in a continuous stretch
- A process returning after an I/O wait starts a new CPU burst
What Are We Trying to Optimize?
--
- Maximize utilization: The fraction of time the CPU is used
- Minimize average turnaround time: The time from a process's arrival to its completion
- Minimize average response time: The time from a process's arrival to its first scheduling
- Fairness: Ensure all processes are treated equally
- Minimize overhead: Run a process long enough to amortize (reduce) the cost of a context switch (~1 microsecond)
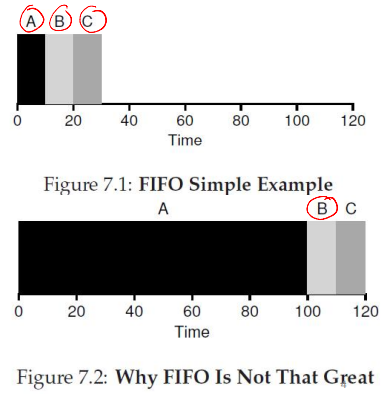
First-in-First-Out (FIFO)
FIFO runs processes in arrival order (e.g., A, B, C arriving at t=0) without preemption until completion
- Pros
- Simple to implement
- Fair based on arrival order
- Cons
- The convoy effect delays short jobs behind long ones
- High turnaround times, especially for processes arriving later or short jobs stuck behind longer ones
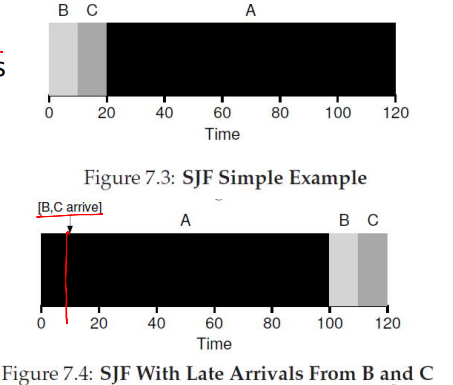
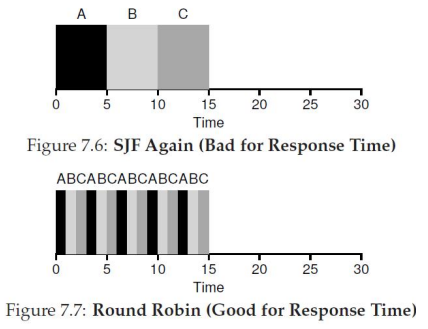
Shortest Job First (SJF)
SJF runs the shortest job first, non-preemptively; it is optimal when jobs arrive simultaneously
- Pros
- Minimizes wait time for simultaneous arrivals
- Efficient for varied job lengths
- Cons
- Short jobs wait if a long job starts first
- Requires accurate job length estimates
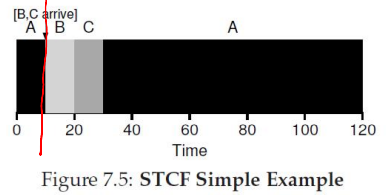
Shortest Time-to-Completion First (STCF)
STCF (also known as SRTF) preempts for the job with the shortest remaining time when new processes arrive
- Pros
- Dynamically reduce wait time
- Prioritizes jobs nearing completion
- Cons
- High context switch overhead
- Requires accurate estimates of remaining time
Round Robin (RR)
RR assigns each process a fixed time slice, preempting and cycling through a queue
- Pros
- Ensure fair CPU sharing
- Provides good response time for interactive systems
- Cons
- Poor turnaround for long jobs due to frequent interruptions
- Time quantum size impacts efficiency
- Too small: Increases context switch overhead
- Too large: Mimics FIFO behavior
Schedulers in Real Systems
--
- Real-world schedulers are more complex
- For example, Linux uses a Multi-Level Feedback Queue (MLFQ)
- Multiple queues, ordered by priority
- The highest-priority queue's process is scheduled first
- Within the same priority, an algorithm like RR may be used
- A process's priority decreases as it ages
Inter-Process Communication
Inter-Process Communication (IPC)
--
- Processes do not share memory with each other
- Each process has its own separate memory space
- Some processes need to collaborate on tasks, requiring them to communicate information
- IPC mechanisms enable information sharing between processes
Shared Memory
--
- Processes can access the same region of memory using the
shmget()system callint shmget (key_t key, int size, int shmflg)
- By providing the same key, two processes can access the same memory segment
- Processes read from or write to this memory to communicate
- Synchronization is needed to prevent one process from overwriting another's data
Signals
--
- A certain set of signals is supported by the OS
- Some signals have a fixed meaning (e.g., terminating a process)
- Others are user-defined
- Signals can be sent to a process by the OS or another process (e.g., pressing Ctrl+C sends a
SIGINTsignal to the running process) - Signal handler
- Each process has default code to execute for each signal
- For example, exiting on a terminate signal
- Some signal handlers can be overridden to do other things
Sockets
--
- Sockets enable communication between processes on the same or different machines
- TCP/UDP sockets for communication across machines
- Unix sockets for communication on the local machine
- Communication via sockets
- Processes open sockets and connect them
- Messages written into one socket can be read from another
- The OS transfers data through the socket buffer
Pipes
--
- The pipe system call returns two file descriptors
- A read handle and a write handle
- Pipes provide half-duplex (one-way) communication
- Data written to one file descriptor can be read from the other
- Regular pipes
- Both file descriptors are initially in the same process
- After a
fork(), the parent and child share the file descriptors - For example, the parent writes to one end, and the child reads from the other
- Named pipes
- Allow two different processes to connect to the pipe's endpoints
- Pipe data is buffered in OS buffers between write and read operations
Message Queues
--
- Provide a mailbox abstraction
- A process can open a mailbox at a specified location
- Processes can send and receive messages through the mailbox
- The OS buffers messages between send and receive operations
Blocking vs. Non-Blocking Communication
--
- Some IPC actions can block
- Reading from an empty socket, pipe, or message queue
- Writing to a full socket, pipe, or message queue
- System calls for reading/writing offer
- Blocking versions: Wait until the operation can complete
- Non-blocking versions: Return an error code if the operation cannot proceed immediately (e.g., a socket read returns an error if no data is available)